ROS Communications

&

What This is Not About
Ros is quite extensive...we will not cover:
- Build System (Catkin & Rosdep)
- Software Packaging (Bloom)
- Build Farm (Open/Closed)
- Capabilities (Drivers, Algorithms, ...)
- Tools (Logging, Introspecting, Viz, ...)
- Community (Documentation, Workshops, ...)
Today we focus on the
Why the Plumbing?
- It's
core - Undergoing significant redevelopment
- Other areas are relatively static
Contents
1.0
- History
- State
- Technicals
- Extensions
- Shortcomings
2.0
- Motivation
- State
- Roadmap
- Building on DDS
- Legacy Support
1.0 - History
- 2007 : Stanford (STAIR, PR1)
- 2007 : Topology : Master/Node/Param Server concepts fixed
- 2007 : Transports : reliable (TCP)/unreliable (UDP) types defined
- 2007 : Messaging Patterns : publishers, subscribers & services
- 2007 :
Implementation : Posix C++ - 2008 : Moved to Willow Garage
- 2008 : Reference Robot : PR2
- 2008 : Implementation : Lisp
- 2009 : Implementation : Python
- 2009 : Implementation : ARM support for c++
- 2009 : Messaging Patterns : actions (c++/python)
- 2010 : Nodelets (IntraProcess, c++ only)
- 2010 :
1.0 Release - 2011 : Reference Robot : Turtlebot
- 2011 : Implementation : Windows support for c++
- 2011 : Implementation : Java/Android
- 2012 :
ROS 2.0 movement started - 2014 : Transferred to OSRF
Current State
- Stable
- No new development (since 2011)
- No new development planned
- Various community workarounds introduced (since 2011)
Mostly everyone
1.0 - Topology
The glue for making this work is via xmlrpc servers at each component.
1.0 - Topology
TODO : image showing 1) master/param, 2) nodes, 3) registrations, 4) connection http://wiki.ros.org/Master
1.0 - Transports
Conceptually organised as
Other options (e.g. shared memory) were explored, but discarded. Consensus was: 1) fast -> use c++ intraprocess connections, 2) convenience -> use python tcpros connections.
1.0 - Messaging
Headers, modules, artifacts
Support for
A limited set of
1.0 - Parameter Server
Primarily used as for static, pre-launch configuration of nodes.
1.0 - Language Implementations
1.0 - How it Got Here
- Single robot
- Massive computational resources on board
- Real time requirements met in a custom manner
- Excellent network connectivity
- Applications in research
- Maximum flexibility, nothing prescribed or proscribed
- e.g., “we don’t wrap your main()”.
1.0 - Shortcomings
Centralised master - Autonomous robots each need their own master
Maintenance - Not a large enough developer or user base
Impractical wireless communications - Missing unreliable implementations
- Unreliable transport configuration (hints) minimal.
- No multicast support - tf trees and point clouds are expensive
Node API only exposed at runtime - Requires expert knowledge to organise a system launch
- Cannot validate/manipulate components on launching
Cannot manage the computational graph - No lifecycle management
- Cannot direct the computation
- Cannot dynamically realign connections
Heavy - too heavy for embedded (< armv6)
Static parameter serving - awkward workarounds to provide dynamic parameterisations
Not realtime
2.0 - Motivation
Support
- Teams of robots
- Small Embedded
- Non-ideal networks
- Connect to relevant communities
- Support patterns for building and structuring systems
Offload to
2.0 - Current State
Decisions No central master - discovery node by nodeOpen Licensing - no closed dependenciesROS Messaging Types - Continue usage of external ROS message type formats (it worked)
- Check cost/apply converters to satisfy any middleware requirements
Implement on DDS - Offload expensive middleware development
- Connect with major players in similar industries
Backwards compatibility - support ways of talking with ROS 1.0
Development Design - messaging/library/stack layoutSimple examples - validated working pubsub/services, ...Unit testing - across linux, arm, windows.
2.0 - Roadmap
Working prototype with fundamental components available for human consumption ~end of summer 2015.
Quite likely a couple of years before fully featured.
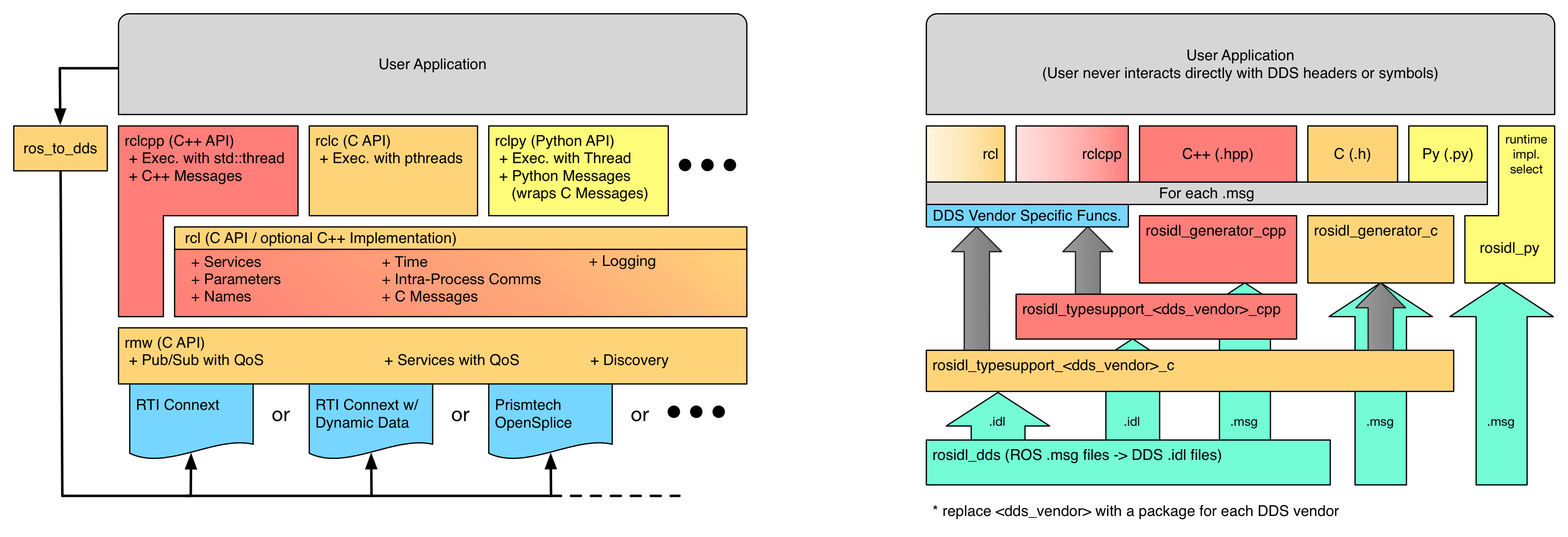
2.0 - DDS
2.0 - ROS Client Library Stack
2.0 - Discovery & Segmentation
Discovery - Nodes use Multicast/Broadcast UDP to find each other
- Implemented with the SDP/SPDP/SEDP protocols from DDS.
Domains - DDS Concept
- Connect to each other on separate multicast domains.
- Replaces the old concept of a ROS Master
Partitions - DDS Concept
- Abstract partitioning for nodes on a single domain.
- Like partitions on a hard drive, but more flexible.
2.0 - Transports
- Focus on
reliable andunreliable - Build up
profiles for connection configurations and apply it to configure all unreliable connections on a system. - This is important for settings that can be configured by a system integrator
- e.g. Standard Wireless Lab Profile
- e.g. Outdoors Wireless.
- Differentiate for
transport hints that must be applied programmatically - This is important for settings that effect how you write code
- Save backlogs to send when a wireless connection gets reestablished.
- Make use of
multicast when available (when DDS layer supports it).
2.0 - Names
- Runtime Renaming
- Aliasing
- e.g. alias
/foo to/foo_compressed with lz compression
Useful for managing and building up complex systems.
2.0 - Languages
2.0 - Managing a Runtime System
Legacy Support
Goal is to have a smooth transition - the fundamental ROS API (ROS messages) will remain the same while the client libraries will have means of connecting/talking to each other.